Phidippus Mystaceus
From OMAPpedia
Phidippus Mystaceus
- Description
-

-
Eight legged walking robot. Brain is accomplished using Pandaboard and world sensing with omnidirectional camera plus high zoom camera(s) in front. Inspiration is taken from real spiders vision system http://australianmuseum.net.au/Uploads/Images/2151/toolkit_sight_jumpingvision.jpg
- Time frame
-
This is recurring project with deadline set 2..4 months for to complete. In December we plan to use both (read on) robots on competition Robotex 2011.
- Background & work by project submitter/s
-
Team members have strong IT and lesser robotics background. Members of Tartu University robotics lab.
-
* does electronics and programming.
-
* Kalle-Gustav Kruus is good in SolidWorks and mechanics.
- We are working on two robots. Because you ask for our background, I include details of both:
- * Robot with interchangeable driving platform (wheels or legs, not important) but packed with eight cameras feeding 8x60fps images to onboard PC. Images get processed in real time on NVIDIA GTS450 GPU.
-
- Old project was split into two because system with legs vibrates and this may destroy lot of expensive hardware. So, eight cameras plus GPU robot will be redone with wheels and legged robot comes next:
-
* Legged robot with omnivision for Robotex 2011. We plan to use custom webcam with Sony 360 degrees lens hidden downside under body and lightweight computing system (Pandaboard!) to analyze input.
- We have hardware left from previous attempt:
-

-
Our tests indicate, that Beagleboard C4 CPU is completely loaded when shooting single VGA image at 30fps and nothing left to process it after. Dual core Cortex A9 should perform better. Also Beagleboard lacks peripherals we need. EDIT: Seems OpenCV makes most of overload. Last week we got 400fps with CPU load under 1% when went to V4L direct camera access.
- Because of his physical properties (legs in front of view) robot is limited to see better image on stop. This makes it act like real animal - walk few steps, stop to make decicions, walk again. We expect this to be really funny side-effect.
- We publish as much information as possible, so anyone is free to reproduce anything from our work.
- Wiki/URL Links
-
Old (slow etc) walking platform as we have it
-
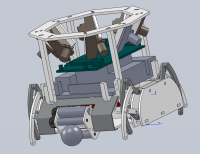
Robot preview (old type)
-
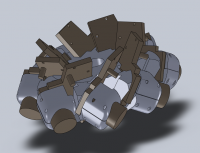
Leg system in prototype phase
-
Old SolidWorks design, etc http://digi.physic.ut.ee/mw/index.php/Spidertank
-
Wiki where we just started to rebuild all information from old pages (old ones are inaccessible to outside world :() http://digi.physic.ut.ee/mw/index.php/Tiim_IT_Grupp
- Some more random photos about our past walker design in test:
-
Lifting heavy weights
-
--""--
-
--""--
-
Onboard computer box is empty. Testing cameras with laptop
-
Just walking with wireless remote control
-
Disassembled walker
- Contact information
- Black Market Winner -- 3/7/11 - 3/11/11 event






{kind=link}